
直流電機驅動電路設計講解之二
其他幾種驅動電路
01 繼電器+半導體功率器件
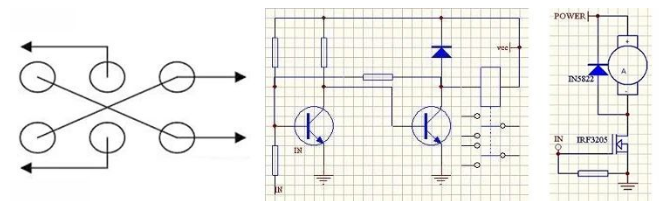
繼電器有著電流大,工作穩定的優點,可以大大簡化驅動電路的設計。在需要實現調速的電機驅動電路中,也可以充分利用繼電器。有一個方案就是利用繼電器來控制電流方向來改變電機轉向,而用單個的特大電流場效應管(比如IRF3205,一般只有N型特大電流的管子)來實現PWM調速,如下右圖所示。這樣是實現特別大電流驅動的一個方法。換向的繼電器要使用雙刀雙擲型的,接線如下左圖;線圈接線如下中圖。
02 步進電機驅動
?小功率4相步進電機的驅動
下面是一種驅動電路框圖:
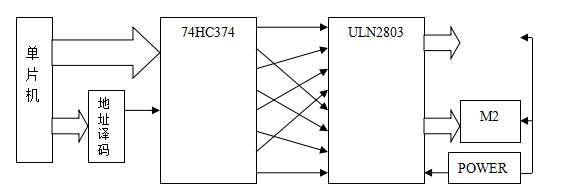
達林頓管陣列ULN2803分別從鎖存器取出第0、2、4、6位和1、3、5、7位去驅動兩個步進電機。四相步進電機的通電順序可以有幾種:A、B、C、D(4相4拍);AB、BC、CD、DA(4相雙4拍);A、AB、B、BC、C、CD、D、DA(4相8拍)。為了兼顧穩定性,轉矩和功耗,一般采用4相8拍方式。所有這些方式都可以通過循環移位實現(也要有定期監控),為了使4相8拍容易實現,鎖存器與驅動部分采用了交叉連接。
步進電機工作在四相八拍模式,對應每個步進電機要有四個信號輸入端,理論上向端口輸出信號可以控制兩個步進電機的工作。寄存器循環移位奇偶位分別作兩個步進電機的驅動端的做法,其思想如下:
LOOP: MOV A,#1110000B;在A寄存器中置入11100000
RR A;右移位
AJMPLOOP;循環右移位
這樣在寄存器A中存儲的值會有如下循環:
11100000→01110000→00111000→00011100→00001110→00000111→10000011→11000001→11100000
其奇數位有如下循環:
1000→1100→0100→0110→0010→0011→0001→1001→1000
其偶數位有如下循環:
1100→0100→0110→0010→0011→0001→1001→1000→1100
將A輸出到P0端口,則奇數位和偶數位正是我們所需要的步進電機輸入信號。
而事實上每個電機的動作是不同的,為此我們在RAM中為每個電機開辟一個byte的狀態字節用以循環移位。在每一個電機周期里,根據需要對每個電機的byte進行移位,并用ANL指令將兩個電機的狀態合成到一個字節里輸出,此時的A同時可以控制兩個電機了。
步進電機的速度由驅動脈沖的頻率決定,移位的周期不同,電機的速度也就不同了。前面提到的電機周期,應該取各種可能的周期的最大公約數。換句話說,一旦電機周期取定,每個電機移位的周期應該是它的倍數。
在程序中,對每個電機的相應時刻設定相應的分頻比值,同時用一個變量進行加一計數:每到一個電機周期若計數變量<分頻比值,則計數變量加1;若相等,則移位,計數變量清零。這樣就實現了分頻調速,可以讓多個電機同時以不同的速度運轉。
另外,也可以采用傳統的查表方式進行驅動,程序稍長,但也比較穩定,這種方法非常適合三相步進電機。
?步進電機的智能驅動方案
步進電機有可以精確控制的優點,但是功耗大、效率低、力矩小。如果選用大功率步進電機,為了降低功耗,可以采取PWM恒流控制的方法。
基本思路是,用帶反饋的高頻PWM根據輸出功率的要求對每相恒流驅動,總體電流順序又符合轉動順序。需要力矩小的時候應及時減小電流,以降低功耗。該方案實現的電路,可以采用獨立的單片機或CPLD加場效應管驅動電路以及電流采樣反饋電路。
- 上一篇:首個數字銀行卡問世,今后再也不怕丟卡補辦了 2020/9/1
- 下一篇:直流電機驅動電路設計講解之一 2020/9/1
